ファナックはNVIDIAとの連携をさらに強化
2026年5月15日
ファナック株式会社
- NVIDIA Isaac SimとROBOGUIDEで強化された「仮想工場」でロボットを直観的に操作
- オープンなロボット基盤モデルNVIDIA Isaac GR00T Nで模倣学習した、Tシャツを畳むファナックロボット
- NVIDIA Jetson Thorプラットフォームを採用
1. NVIDIA Isaac SimとROBOGUIDEで強化された「仮想工場」でロボットを直観的に操作
ファナックは、NVIDIAが提供するオープンなロボットシミュレーション用レファレンス フレームワーク「NVIDIA Isaac Sim」と弊社のロボットシミュレーションソフト「ROBOGUIDE」の連携を強化し、仮想工場における直観的な操作と、よりシームレスに密結合された高精度デジタルツインを実現しました。
昨年12月の国際ロボット展では、ROBOGUIDEで作成したロボット動作シミュレーションをNVIDIA Isaac Simに取り込み、実機と同一の制御アルゴリズムを用いて、正確な軌跡とサイクルタイムを仮想空間上に再現する技術を披露しました。今回発表する連携強化により、両システムはより密接に結合し、ロボットシステムの動作確認とバーチャルコミッショニングに向けてさらに実践的、効率的なシミュレーション環境を実現します。
まずひとつ目の連携は、NVIDIA Isaac Simが前面に立ち、ROBOGUIDEが黒子として、仮想空間におけるロボットの正確な挙動を実現する形式です。ファナックのROBOGUIDEはNVIDIA Isaac Simと密結合され、2つのシステムは常時直接通信を行います。この新しい環境でファナックロボットのユーザは、Isaac Sim中のロボットを、ROBOGUIDEに接続された仮想および実物の教示操作盤から、あたかも本当のロボットを操っているかのように直観的なリアルタイム操作が可能です。Isaac Simの仮想空間におけるファナックロボットに対して、ジョグ操作はもちろん、この結合された教示操作盤でロボットプログラムを教示して実行、確認することが可能です。ロボット導入前の適用検討や工程設計をGPUによって高速化し、センサと環境も含めたシミュレーションを直観的に、効率よく行うことができます。
この連携からさらにNVIDIA Isaac Labのオープンなロボット学習用フレームワークやNVIDIA Omniverseライブラリを活用することにより、ケーブルなど柔らかい部品の取り扱いや、部品同士を組み付ける勘合作業といった、従来は再現が難しかった作業の高精度シミュレーションも可能になります。Isaac Simの仮想空間で動作するファナックロボットは、ROBOGUIDEとの結合により、プログラムの実行において実機と同じ軌跡、同じサイクルタイムで動作し、シミュレーションと実機との間のギャップを解消します。この組み合わせは、強化学習や模倣学習を用いたロボット動作の検証にも対応し、フィジカルAIシステムの適用検討と立上げを加速させます。
ふたつ目の連携は、ROBOGUIDEが前面に立ち、NVIDIAの物理エンジンが背後で高度なシミュレーションを実現する形式です。これにより、ROBOGUIDEは「NVIDIA PhysX」物理エンジンを利用できるよう進化しました。これまでシミュレーションが難しかった「ばら積み取り出し作業」をROBOGUIDEの仮想空間で再現できます。部品が無造作に積まれた状態を物理シミュレーションで簡単に再現し、ROBOGUIDE中の3次元ビジョンシステムで部品位置を認識、ロボットがピック&プレースを行います。ばら積みされた部品をロボットが引き抜けない場合を判定して、別の部品を取り出す、といった現実の挙動を机上で再現できます。
この進化により、従来は現物を用いた試行錯誤が必須だったばら積み取り出しシステムの検討を、仮想空間上で事前に完了させることが可能になります。熟練エンジニアが時間をかけて現場で行ってきたばら積み取り出しシステムの検討と立ち上げが、ROBOGUIDEと「PhysX」の組合せにより、一気に効率化されます。
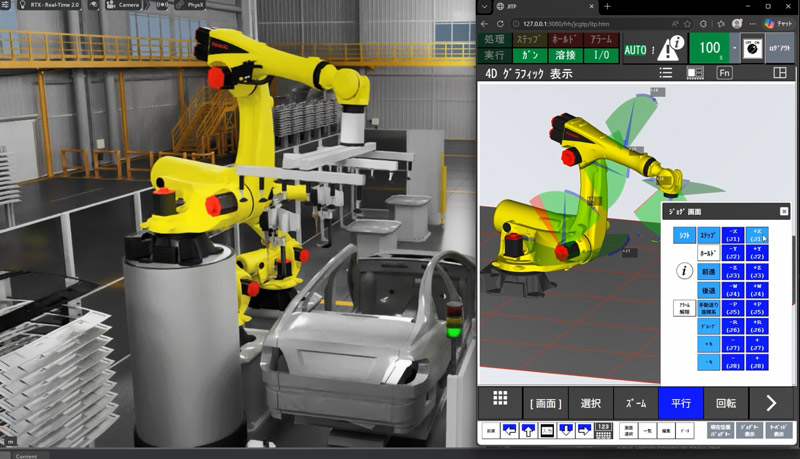
ROBOGUIDEの教示操作盤からNVIDIA Isaac Sim中のロボットを操作
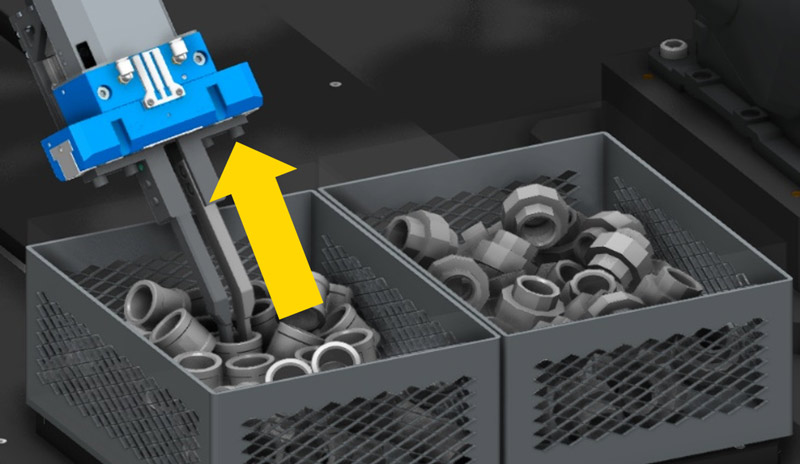
物理エンジンを用いたばら積み取り出しのシミュレーション
2. オープンなロボット基盤モデルNVIDIA GR00T Nで模倣学習した、Tシャツを畳むファナックロボット
今回の展示会では、ファナックの協働ロボットCRX × 2台による双腕システムで、NVIDIAのオープンなロボット基盤モデル NVIDIA Isaac GR00T Nを用いて柔軟物(Tシャツ)を畳む作業の模倣学習を行ったシステムを披露します。柔軟物であるTシャツを畳む作業は、形を変え続ける対象に応じてロボットの動きを常に変えていく必要があり、従来のプレイバックティーチやビジョン補正では実現困難でした。今回、オペレータがCRXを操作してTシャツを畳む様子から模倣学習を行い、双腕のCRXがTシャツを畳みきれるよう、作業のコツを教え込みました。
模倣学習からリアルタイムに生成される動作により、CRXはカメラで対象の様子を見ながら自律的にTシャツを畳みます。従来、模倣学習によるロボット動作は細切れでぎくしゃくした動きになりがちでした。今回、ファナックのモーション制御技術をNVIDIA GR00T Nモデルと組み合わせることで、模倣学習かつ滑らかな動作を実現しました。双腕ロボットが、リアルタイムでカメラ画像を見ながら自律的にTシャツを畳む実演をご覧ください。

Tシャツを畳むファナックロボットの双腕システム
3. NVIDIA Jetson Thor プラットフォームを採用
ファナックは、昨年の国際ロボット展で、オープンプラットフォームに基づく「人にぶつからないAIロボット」のシステムを披露しました。今回、このシステムに、NVIDIAの最新のロボティクス向けコンピュータ「NVIDIA Jetson Thor」を新たに採用しました。昨年披露したシステムで使用していた「NVIDIA Jetson AGX Orin」モジュールを「Jetson T5000」モジュールにバージョンアップしたことで、このシステムのAI演算性能は一気に7.5倍以上も向上しました。ファナックの展示会会場では、「Jetson Thor」の強力なAI演算能力を生かした、より迅速かつ滑らかに人の腕を避けるロボットを体験できます。

NVIDIA Jetson Thor プラットフォームを採用したAIロボット
本年5月に開催するファナックの新商品発表展示会では、仮想空間上のロボット操作と高精度シミュレーション、NVIDIA PhysXを活用した物理シミュレーション、NVIDIAのロボット基盤で模倣学習した双腕ロボットの実演、そして、最新のNVIDIA エッジ コンピューティング プラットフォームを採用した協働ロボットシステムを、実際に操作して体験できます。さらに進化したファナックとNVIDIAの最新AI技術に、ぜひご期待ください。